|
|
You are here: Panda Wiki>DCS Web>SupportedHardware>CAN (2015-02-03, PeterZumbruch)Edit Attach
CAN Bus interface for PANDA
This is the wiki of the PANDA CAN bus interface for the Raspberry Pi ComputerRequirements
Many devices used in the PANDA Detector Control are controlled via a CAN bus interface. Therefore we need also a CAN bus interface for the front-end computers which can be used with EPICS. This interface must fulfill the following requirements:- High data throughput
- Availability of hardware
- Easy maintainability of software
- Reliability
- Costs should be as low as possible
- Little space required
- Shielding
- Galvanic insulation
Hardware
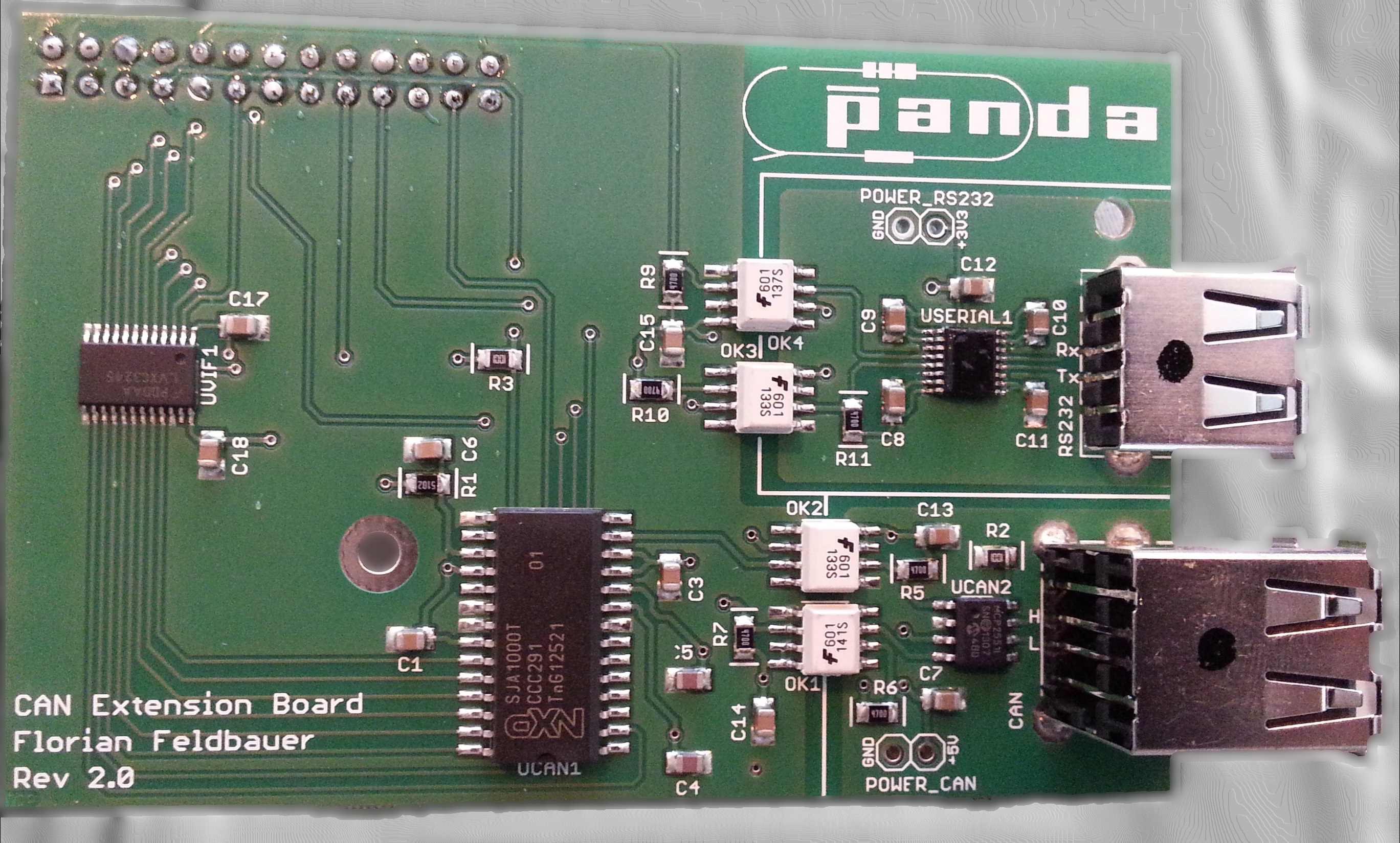
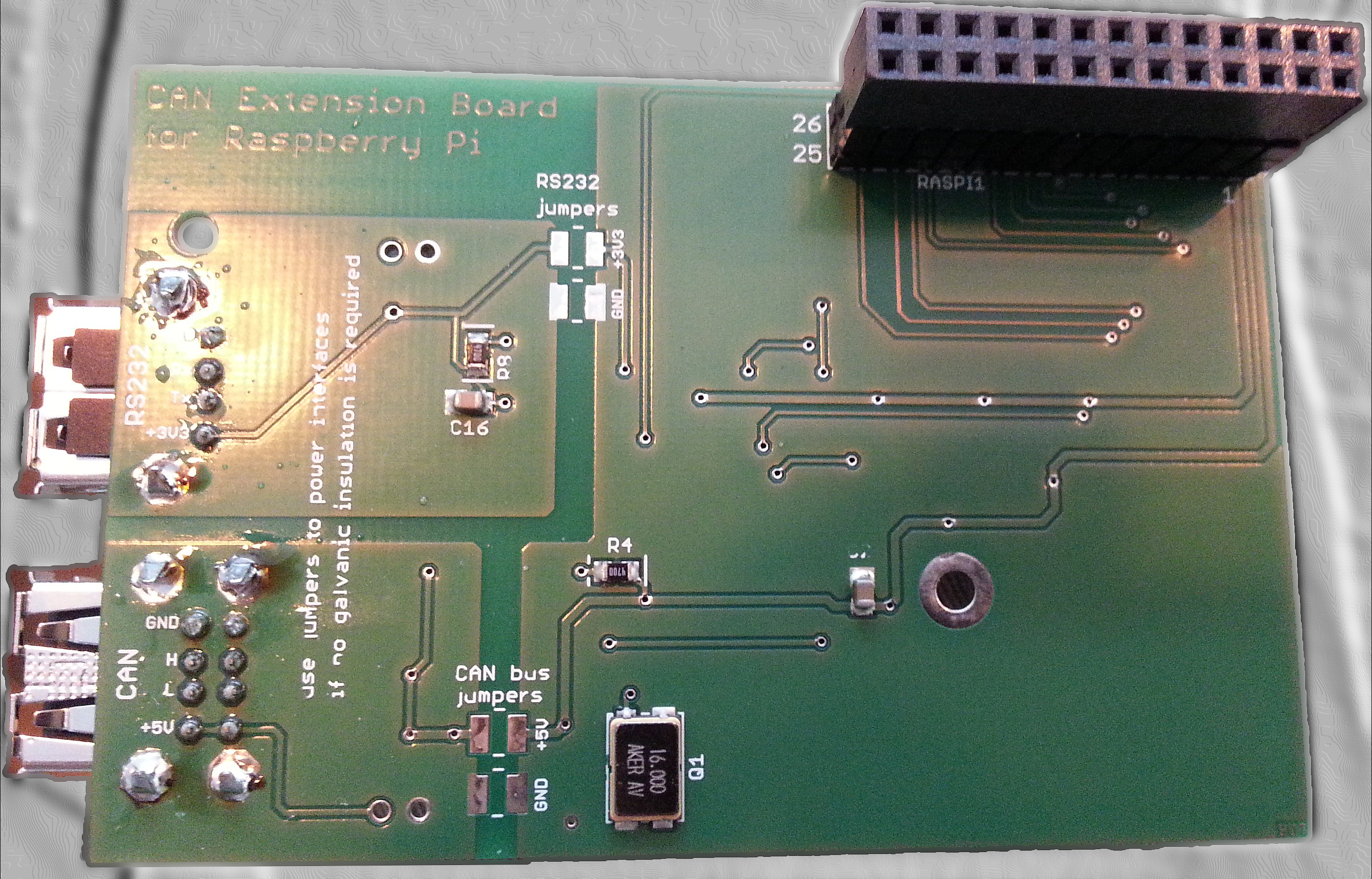
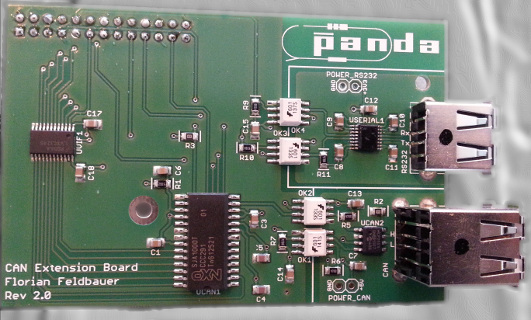
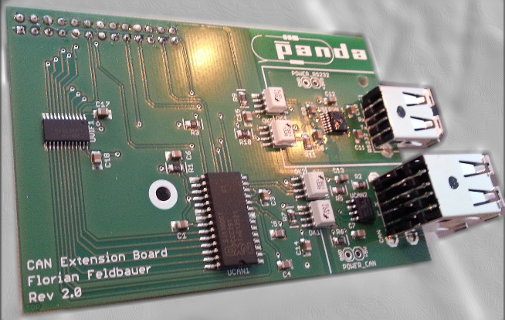
A small PCB using the SJA1000 stand-alone CAN controller was developed. This chip has a parallel interface using eight multiplexed data-/address lines and five control lines. To safe space and keep the costs as low as possible this chip is directly connected to the general purpose I/O ports of an CPU. The developed PCB has the same dimensions as the Raspberry Pi Computer and is designed as an extension board for this computer. It also provides a RS232 interface.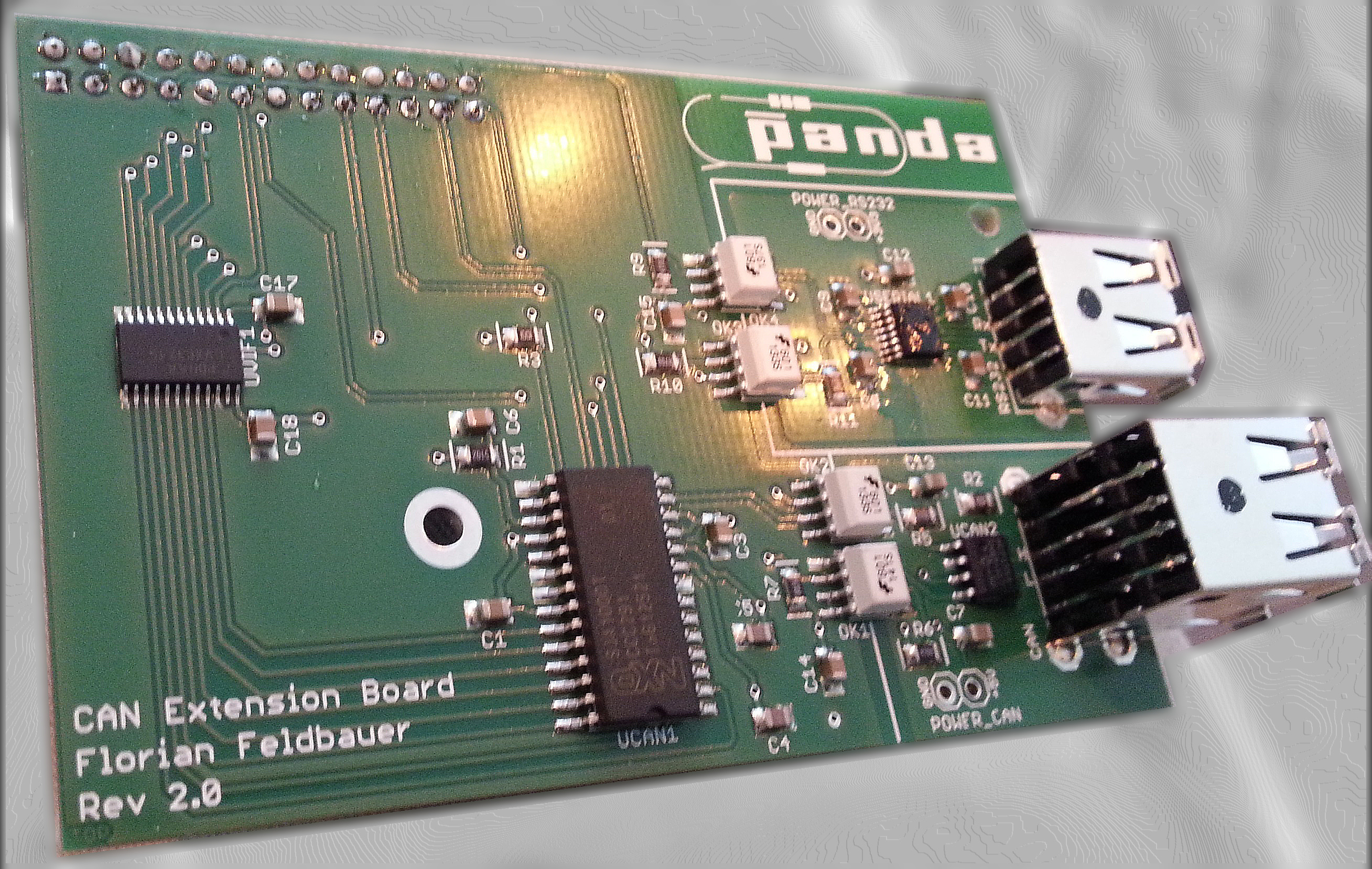
Schematics and Layout
- PANDA-RPi_CAN.pdf: Schematic of the adapter PCB
- PANDA-RPi_CAN_brd.pdf: Board Layout
Software
The kernel module for the CAN bus interface is based on the open-source kernel module for the interfaces by PEAK Systems. The interface supports all standard bit rates. For testing the performance frames with 8 byte length have been send over the CAN bus:| Bitrate | Extended | Standard |
|---|---|---|
| kbit/s | frames/s | |
| 5 | 34 | 41 |
| 10 | 69 | 82 |
| 20 | 139 | 165 |
| 50 | 350 | 416 |
| 100 | 689 | 800 |
| 125 | 869 | 1052 |
| 250 | 1666 | 2000 |
| 500 | 3333 | 4000 |
| 1000 | 6666 | 6666 |
EPICS support
EPICS device support for the CAN bus interface itself and several devices controlled via CAN bus is available:- ISEG EHS/EDS high voltage power supply
- Wiener VME crate remote control
- THMP
- Light pulser
- TMCM142 high-performance single axis stepper motor controller/driver
SD-Card Image for Raspberry Pi Computer
A SD-Card image for the Raspberry Pi computer with the kernel module for this interface and EPICS already installed is available under http://www.ep1.rub.de/~florian/epics/raspi_panda.img.gz A 4 GB card is required. Currently there are two users available:pi (passwd: raspberry)
panda (passwd: pandadcs) An EPICS IOC is installed via the PANDA DCS apt repository. Configuration of the IOC can be done in the dir "/etc/epics/iocpandadcscan/" After booting the Pi ProcServ will be started with the EPICS IOC for CAN bus as child process allowing access via telnet on port 20000. The child process is not started automatically.
Contact Person
For further questions and suggestions please contact FlorianFeldbauer -- PeterZumbruch - 26 Jun 2013-- FlorianFeldbauer - 02 Feb 2015


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
PANDA-RPi_CAN.pdf | manage | 67 K | 2013-06-26 - 12:38 | FlorianFeldbauer | Schematic of the adapter PCB |
| |
PANDA-RPi_CAN_brd.pdf | manage | 160 K | 2013-06-28 - 09:28 | FlorianFeldbauer | Board Layout |
| |
rasPI_CAN_back.jpg | manage | 1 MB | 2013-06-26 - 14:57 | PeterZumbruch | rasPi Can back |
| |
rasPI_CAN_back_small.png | manage | 275 K | 2013-06-26 - 14:57 | PeterZumbruch | rasPi Can back small |
| |
rasPI_CAN_front-2.jpg | manage | 1 MB | 2013-06-26 - 14:58 | PeterZumbruch | rasPi Can front 2 |
| |
rasPI_CAN_front-2_small.jpg | manage | 98 K | 2013-06-26 - 14:58 | PeterZumbruch | rasPi Can front 2 small |
| |
rasPI_CAN_front.jpg | manage | 1 MB | 2013-06-26 - 14:59 | PeterZumbruch | rasPi Can front |
| |
rasPI_CAN_front_small.png | manage | 275 K | 2013-06-26 - 14:58 | PeterZumbruch | rasPi Can front small |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Edit | Attach | Print version | History: r9 < r8 < r7 < r6 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r9 - 2015-02-03, PeterZumbruch
DCS Web
Web Home | Search Changes | Notifications Index | Topics
Web Home | Search Changes | Notifications Index | Topics
- Webs
- Cerenkov * Cerenkov.Pandacerenkov * DCS * Daq * Daq.Pandadaq * Detector * EMC * EMPAnalysis * Forwardstraws * GEM * MC * Magnet * Main * Mvd * PANDAMainz * PWA * Pbook * Personalpages * Physics * Physics.Baryons * Physics.CharmoniumAndExotics * Physics.HadronsInNuclei * Physics.OpenCharm * PhysicsCmt * SPC * STT * Sandbox * ScrutinyGroup * Tagpid * Tagpid.Pandatagpid * Tagtrk * Tagtrk.Pandatagtrk * Target * Target.ClusterJetTarget * Tof * WebServices * YoungScientists * ZArchives
Create personal sidebar
Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Ideas, requests, problems regarding Panda Wiki Send feedback | Imprint | Privacy Policy (in German)
Ideas, requests, problems regarding Panda Wiki Send feedback | Imprint | Privacy Policy (in German)